
Överföringsegenskaper hos en vibrationsdämpare
Om vi ritar om den tidigare fig.5 och även tar hänsyn till dämpningen i ett system får vi fig.8 som visar överföringsegenskaperna hos en vibrationsdämpare som funktion av vibrationsfrekvensen. Olika dämpningsfaktorer på systemet ger olika kurvor över amplitudförhållandet.
Vid frekvensen fs=fr (frekvenskvoten=1) får vi alltså, som fig. 8 även visar, en maximal ökning (resonans) av överföringen. Vibrationsamplituden för utrustningen (massa M) blir i denna punkt förstärkt. Beroende på dämpningen i systemet kan förstärkningen vara 2-10 ggr. Du kanske tänker att det är osannolikt att störvibrationerna skulle sammanfalla exakt med systemets resonansfrekvens. Tyvärr behöver de inte matcha exakt. Hamnar störvibrationerna inom cirka 20 procent av vibrationsdämparens resonansfrekvens så har man troligtvis problem.
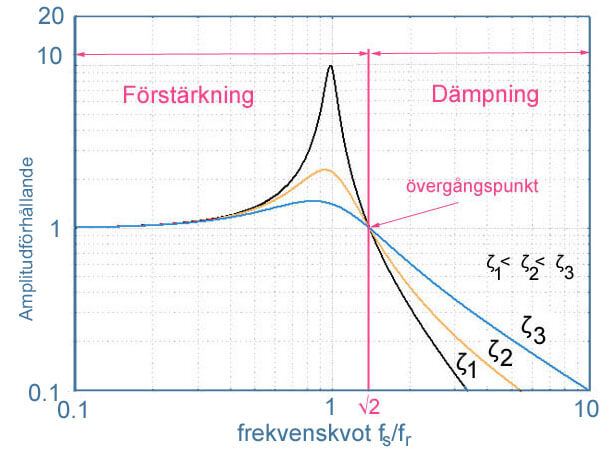
Tre kurvor visas som representerar olika nivåer av dämpning och där: ζ 1 < ζ 2 < ζ 3 =1. Och där ζ 3 är den kritiska dämpningen, se ovan under rubriken ”Dämpningsfaktor”
Förstärkning
När störfrekvensen är mycket låg jämfört med egenfrekvensen är amplitudförhållandet nära ett. Om störfrekvensen ligger nära egenfrekvensen är amplitudförhållandet högt >1 och systemet befinner sig i området ”Förstärkning”. Här vill man alltså inte befinna sig eftersom vibrationerna i systemet förstärks.
Övergångspunkt
Vid övergångspunkten där fs/fr-kvoten är lika med √2 går systemet över i dämpning och amplituden sjunker kontinuerligt.
Dämpning
Vi kan se från figuren att ökad dämpning gör att överföringskurvan blir tillplattad och att vibrationer runt resonansfrekvensen minskar men i regionen ”Dämpning” så ökar kurvan. Har man störfrekvenser nära systemets resonansfrekvens så är alltså ökad dämpning det som gäller. Men är störfrekvenserna klart högre än resonansfrekvensen så är låg dämpning att föredra.
Ideal vibrationsdämpare
När ett system har olika dämpning får man alltså vid samma frekvensförhållande olika värden på amplitudförhållandet vilket åskådliggör den kompromiss man måste göra när man väljer en vibrationsdämpare.
Om de störande frekvenserna är kända, t.ex. en motors varvtal, ska vi konstruera ett lätt dämpat system med en resonansfrekvens långt under dessa, åtminstone ligger lägre än halva störfrekvensen. Den låga dämpningen skulle ge optimal isolering. Men i de fall där de störande frekvenserna är många, okända eller omöjliga att undvika, föredras ett mycket dämpat system. Den höga dämpningen minskar toppresponsen som kan uppstå om störningarnas frekvens ligger nära resonansfrekvensen. Tyvärr minskar också isoleringen i det dämpande området, enligt diskussionen ovan.
Den ideala vibrationsdämparen ska alltså ha så lite dämpning som möjligt i sitt isoleringsområde (dämpningsområde) och så mycket som möjligt vid sin egenfrekvens för att minska förstärkningen vid resonans.
Underlag
För att välja rätt typ av vibrationsdämpare är det även viktigt att förstå hur den underliggande ytan (supportstrukturen) för utrustning kommer att bete sig. Riktlinjen är att hoptryckningen (”deflection”) behöver vara mer än tre gånger större för vibrationsdämparen än för underlaget. Vilket alltså betyder att vibrationsisoleringen skall vara ”mjukare” än den bärande byggnadskonstruktionen.
På en styv underliggande ytan som ett betonggolv i en bottenvåning i en byggnad kan för viss utrustning någon form av gummidämpare vara tillräckligt. Skulle man däremot flytta utrustningen högre upp i byggnaden för att placeras på ett golv som vilar på ett träbjälklag som är mer känslig för vibrationer kan någon form av fjäderdämpare krävas.